Inkrementální optoelektronické senzory posuvu[i, s.32]
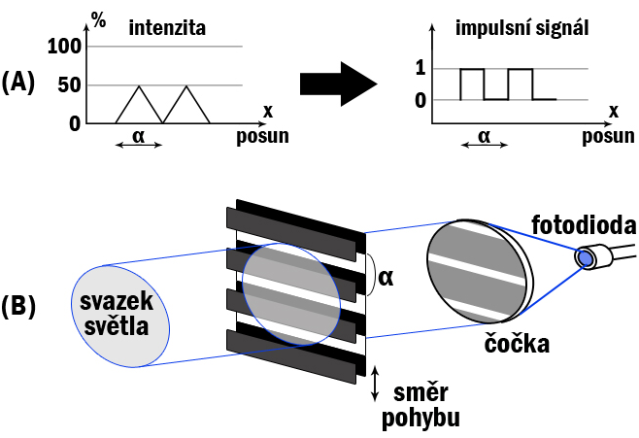
Princip (Obr. 1B) spočívá v clonění světelného toku mezi zdrojem a fotocitlivými prvky pravítkem (nebo rotorem), které je pravidelně rozděleno na propustné a nepropustné části – kroky s periodou α. Posuv o jeden krok vyvolá přerušení a obnovení světelného svazku a výstupní signál, převedený na impuls unifikovaného tvaru, inkrementuje obsah čítače.
Typický optický inkrementální senzor snímá najednou 3 kanály A, B a C. Výstup kanálů A a B je impulsni signál (Obr. 1A). Kanály jsou vůči sobě posunuty mechanicky o α/4 a výstupní signály jsou o stejnou hodnotu posunuty fázově elektricky (tzv. kvadraturní výstup). Fázový posun umožňuje detekci směru pohybu. Kanály A a B mají obvykle své komplementární protějšky A a B, jejichž snímáním je zajištěna vyšší odolnost vůči rušení. Antiparalelním zapojením posunutých snímacích fotodiod (viz. model senzoru) vzniká na výstupu signál blízký funkci sinus. Kanál C informuje o poloze referenční značky (v případě senzorů natočení 1x za otáčku).
Výstupní signál je modulován klopným obvodem a poté zpracováván řídicí jednotkou s čítačem. Rozlišovací schopnost lze až 4krát zvýšit zpracováním všech hran modulovaných signálů kanálů A a B.
Opt. senz. polohy[i, s.31]
Optické senzory polohy se využívají pro měření polohy, posuvu nebo rozměru. Obecný princip spočívá v detekci rozdílu mezi výstupní veličinou detektoru a parametry zdroje optického záření. Tyto rozdíly mohou být způsobeny:
- Změnou polohy zdroje světelného záření
- Zastíněním světelného toku mezi zdrojem a detektorem světelného záření
- Změnou úhlu odrazu paprsku zdroje
- Interferencí zdrojového a odraženého paprsku
Podrobnější popis senzorů založených na těchto principech lze nalézt ve skriptech [i].
Model optického inkrementálního senzoru
Zdroje chyb[ii]
Chyby senzorů mohou být dány zvolenou konstrukcí, kde se může projevit především proměnlivá svítivost LED a citlivost fotodiod, nepřesnosti rozměrů a geometrie polohy průhledných prvků senzoru nebo excentrické uložení rotoru v případě detekce úhlu natočení. Mohou se projevit také vlivy okolí jako zkreslení signálu vedením, mechanické vibrace nebo překročení maximální frekvence signálu. Typické jsou také kombinace těchto vlivů, např. při velmi pomalém posuvu (otáčení) a působení vibrací může dojít k vícenásobné detekci jednoho pulsu.
Senz. s abs. prost. kódem[i, s.33],[iii, s.283]
Pokud je potřeba eliminovat chyby způsobené změnou obsahu čítače rušivými impulsy, kdy je nestačí korigovat pomocí referenčních značek, používají se výrobně náročnější senzory s absolutním prostorovým kódem.
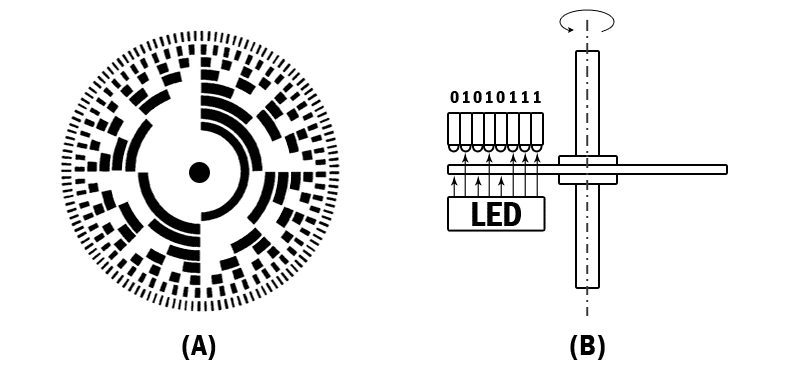
Princip senzoru je velmi podobný, ale na pravítku (kotouči) je více stop tak, že vytvářejí obrazec vhodného kódu (binární kód na Obr. 2A nebo robustnější Grayův kód[iv, s.330],[vi]). Přečtení kódu (Obr. 2B) udává jednoznačnou polohu (úhel natočení) senzoru.
Prakticky
Inkrementální senzory jsou charakteristické velkou rozlišovací schopností, malými rozměry a nízkou hmotností[ii, s.32].Krok senzoru (α) je fyzicky omezen difrakcí světla přibližně na 7 μm[i, s.33],[iii, s.282]. V případě potřeby lze tuto hranici posunout např. zkrácením vlnové délky použitého světelného zdroje.
U senzorů s prostorovým kódem je udáváno možné použití až 17 stop, tj. 217=131 072 rozlišitelných poloh[i, s.34].
Obr. 1 – Princip získání signálu[iii, s.282, upraveno]
Obr. 2 – Optoelektronický senzor s binárním kódem[v, upraveno]
Odkazy a další zdroje
- RIPKA, Pavel; ĎAĎO, Stanislav; KREIDL, Marcel; NOVÁK Jiří. Senzory a převodníky. Dotisk prvního vydání. Praha : Nakladatelstvní ČVUT, 2005. 135 s.
- NOVÁK, Petr. Snímače: Rotační inkrementální senzory. Automa. 2002, č. 10 [cit. 2012-03-14], s. 2. Dostupné z WWW: <http://www.odbornecasopisy.cz/download/au100232.pdf>.
- FRADEN, Jacob. Handbook of Modern Sensors. Třetí vydání. New York : Springer - Verlag, Inc., 2004. 589 s.
- RIPKA, Pavel; TIPEK, Alois. Modern Sensors Handbook. První vydání. Londýn : ISTE Ltd, 2007. 518 s.
- MAZANEC, Jiří. Automatizace [online]. 2006-06-09 [cit. 2012-03-14]. Optické snímače polohy - enkodéry. Dostupné z WWW: <http://jonatan.spse.pilsedu.cz/~mazanec/opticke_enkodery.htm>.
- Grayův kód. Wikipedie: otevřená encyklopedie [online]. San Francisco (CA): Wikimedia Foundation, 2001- [cit. 2012-04-25]. Dostupné z: http://cs.wikipedia.org/wiki/Grayův_kód

